| Past Issues in this Series |
|
The Power of Posture By Edward Glaser, DPM |
|||||
|
Nowhere, in the practical universe, would anyone design something to affect a change in the human body without first clearly defining what that change should look like. In the world of custom functional foot orthotics, though, the emphasis has been on poorly controlled casting technique and posts, with no clear definition of how foot posture should look with correction. In fact, many biomechanical gurus will argue that foot posture does not have to be changed at all –just somehow mechanically influenced by a plethora of different posting techniques and a small amount of arch support. Many decisions are made based on personal experience and preference in the context of theoretical frameworks1. Fortunately for them their work is not judged by mechanical engineers solving problems in the real world. In order to establish true practical and mechanical respectability for our orthotic interventions, we must adhere to some fundamental principles. First, we have to be touching the foot in order to apply a force to it. Second, the entire plantar surface must make contact with the orthotic shell. This gives enough surface area to shape every part of the foot and to distribute the force required for that shaping evenly and comfortably. Third, we cannot change the way a foot functions on the ground without changing its posture through stance phase. Expecting a different result without significant change is a definition of insanity. And the key change we need is in bony structural position or posture, especially in the tarsus. What would that position look like? If we re-consider the goals of correction outlined in the last article for the flexible over-pronator, it should be fairly easy. The key is getting enough supination where it is needed in the gait cycle. How much is enough or too much? We know that the gait sequence is the same for everyone, but there are many different varieties of feet. So we define a posture based on a gait-referenced casting sequence, semi-weight-bearing in foam, which will look differently for each foot according to the restraints of its anatomy. But what will be the same for each foot is this: the maximum amount of plantar-grade supination, with the heel and met heads all flush to the floor (the same transverse plane), will be captured. The casting technique is crucial because it uses functional reference criteria to define a corrected foot posture: the floor and real world loading patterns of the foot during stance phase captured in a dynamic sequence. Research has shown us that static evaluation and measurements do little to predict dynamic function2,3.
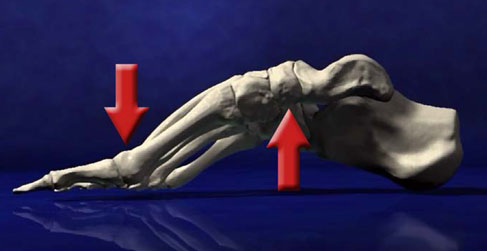
I call this position MASS, an acronym for Maximal Arch Subtalar Stabilization. This is the position any foot would assume if it was supinated as much as possible on the floor with all met heads and the heel still on the floor.(See picture above). When the foot is corrected to this position, it will have enough supination to achieve the goals outlined earlier. The shell must be made with enough flex, though, to allow a minimal functional amount of pronation for shock absorption, terrain adaptation and proprioception. So the shell should be calibrated during manufacture, depending on body weight, foot flexibility and activity level. A common misunderstanding about this approach is that when we speak of maximal supination, some envision an inverted foot posture relative to the floor, begging for lateral ankle sprains. In fact, the foot is parallel to the floor because we used the floor as the frame of reference during casting. Hodgson et al found that this type of orthotic actually shifted plantar pressures medially compared with a standard, posted, Rootian-type (PAL) orthotic 4. Maximal supination here refers to the tarsus, and even then only maximal within the constraint condition of heel and met heads remaining flush to the floor. By adding supination to the tarsus, we can delay the onset of pronation at heel strike by supporting the foot in supination through swing phase. Then, in stance phase, when body weight and momentum are trying to collapse the arches of the foot, we can enable enough supination to stabilize the first ray against the ground for correct function during forefoot loading. In my next article, I will look at the relative mechanical advantages of MASS position correction with that of standard Rootian methodology. REFERENCES
|